Kako povećati online prodaju u ovoj prazničnoj sezoni uz personalizovano kupovno iskustvo
Praznična sezona je najvažniji period za trgovce Osim velikog obima prodaje, to je i prilika da ostavite trajan utisak na…
Read moreThings Solver: Agentic AI + Customer 360 + Data Management
16. 11. 2018.
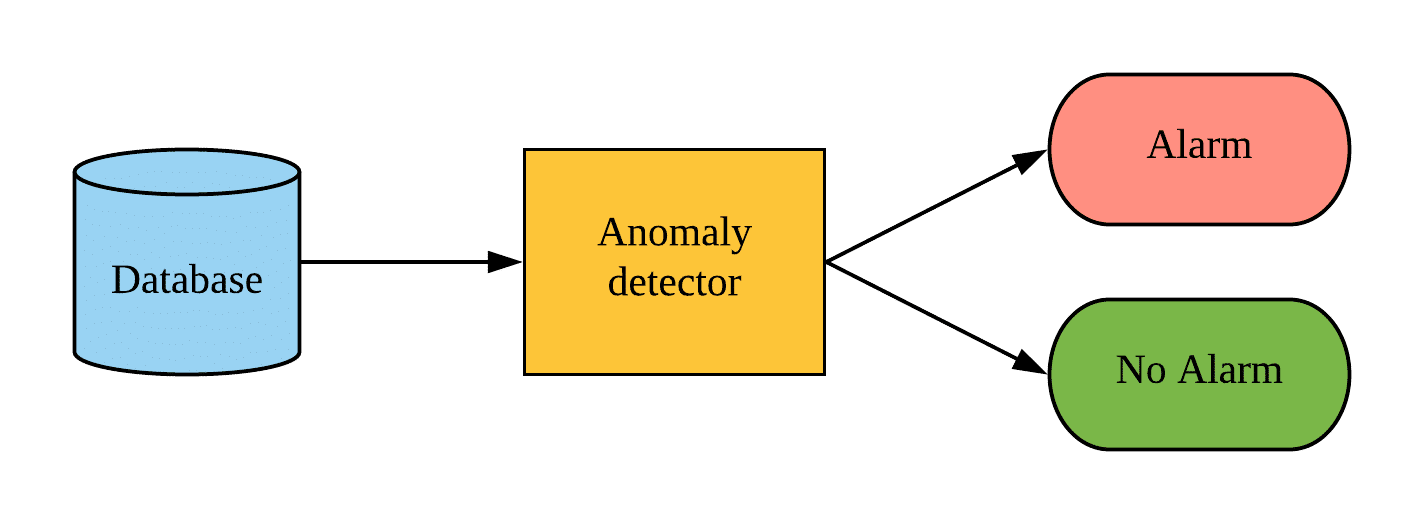
Recimo da pratite veliki broj poslovnih ili tehničkih KPI-ja (koji mogu imati sezonski karakter i šumove). U vašem je interesu da automatski izolujete vremenski okvir za jedan KPI čije ponašanje odstupa od normalnog ponašanja (kontekstualna anomalija – za definiciju pogledajte ovaj post). Kada imate problematičan vremenski okvir pri ruci, možete dalje istražiti vrednosti tog KPI-ja. Zatim možete povezati anomaliju sa događajem koji je izazvao neočekivano ponašanje. Ono što je najvažnije, tada možete delovati na osnovu informacija.
Kako bismo izvršili automatsku izolaciju vremenskog prozora, potreban nam je model mašinskog učenja za detekciju Cilj ovog posta je da predstavi probabilističku neuronsku mrežu (VAE) kao model mašinskog učenja vremenske serije i istraži njenu upotrebu u oblasti detekcije anomalija. Kako ovaj post pokušava da smanji matematiku što je više moguće, ipak je potrebno određeno poznavanje neuronske mreže i verovatnoće.
Kako je Valentina pomenula u njenom postu postoje tri različita pristupa detekciji anomalija korišćenjem mašinskog učenja zasnovanog na dostupnosti oznaka:
Potrebno je da neko ko poznaje domen manuelno dodeli oznake. Stoga je sticanje preciznih i opsežnih oznaka dugotrajan i skup proces. Namerno sam stavio nenadziranu detekciju kao prvi pristup, jer ne zahteva oznake. Međutim, to zahteva da normalni slučajevi budu brojniji od abnormalnih. Međutim, to zahteva da normalni slučajevi budu brojniji od abnormalnih.

Istorijski gledano, različite vrste neuronskih mreža su imale uspeha u modeliranju složenih nelinearnih podataka (npr. slike, zvuk i tekstualni podaci). Međutim, budući univerzalni aproksimatori funkcija kakvi jesu, oni su neizbežno našli svoj put u modeliranju tabelarnih podataka. Jedna zanimljiva vrsta tabelarnog modeliranja podataka je modeliranje vremenskih serija.
Model koji je izvršio prelazak sa složenih podataka na tabelarne podatke je Autoenkoder (AE). Autoenkoder se sastoji iz dva dela – enkodera i dekodera. Pokušava da nauči manji prikaz svog inputa (enkoder) i zatim rekonstruiše svoj input iz tog manjeg prikaza (dekoder). Ocena anomalije je dizajnirana da odgovara grešci rekonstrukcije.
Autoenkoder ima probabilističkog brata Varijacionog autoenkodera (VAE), bajesovsku neuronsku mrežu. Pokušava da ne rekonstruiše originalni input, već parametre (izabrane) distribucije izlaznih vrednosti. Ocena anomalije je dizajnirana da odgovara verovatnoći anomalije. Izbor distribucije je zadatak koji zavisi od problema, a može biti i putanja istraživanja. Sada ulazimo u malo više tehničkih detalja.
I AE i VAE koriste klizni prozor vrednosti KPI kao input. Performanse modela su uglavnom određene veličinom kliznog prozora.

Manje zastupljenost u kontekstu VAE naziva se latentna varijabla i ima prethodnu distribuciju (odabranu da bude Normalna distribucija). Enkoder je njegova zadnja distribucija, a dekoder je njegova distribucija verovatnoće. Oba predstavljaju normalnu distribuciju u našem zadatku. Dodavanje unapred bi bilo sledeće:
Varijacijski autoenkoder kao probabilistička neuronska mreža (takođe nazvana Bajesova neuronska mreža). To je takođe vrsta grafičkog modela. Dubinski opis grafičkih modela može se naći u Poglavlju 8 Mašinsko učenje i prepoznavanje obrazaca Kristofera Bišopa.
Definicija modela TensorFlow:
class VAE(object):
def __init__(self, kpi, z_dim=None, n_dim=None, hidden_layer_sz=None):
"""
Args:
z_dim : dimension of latent space.
n_dim : dimension of input data.
"""
if not z_dim or not n_dim:
raise ValueError("You should set z_dim"
"(latent space) dimension and your input n_dim."
" \n ")
tf.reset_default_graph()
def make_prior(code_size):
loc = tf.zeros(code_size)
scale = tf.ones(code_size)
return tfd.MultivariateNormalDiag(loc, scale)
self.z_dim = z_dim
self.n_dim = n_dim
self.kpi = kpi
self.dense_size = hidden_layer_sz
self.input = tf.placeholder(dtype=tf.float32,shape=[None, n_dim], name='KPI_data')
self.batch_size = tf.placeholder(tf.int64, name="init_batch_size")
# tf.data api
dataset = tf.data.Dataset.from_tensor_slices(self.input).repeat() \
.batch(self.batch_size)
self.ite = dataset.make_initializable_iterator()
self.x = self.ite.get_next()
# Define the model.
self.prior = make_prior(code_size=self.z_dim)
x = tf.contrib.layers.flatten(self.x)
x = tf.layers.dense(x, self.dense_size, tf.nn.relu)
x = tf.layers.dense(x, self.dense_size, tf.nn.relu)
loc = tf.layers.dense(x, self.z_dim)
scale = tf.layers.dense(x, self.z_dim , tf.nn.softplus)
self.posterior = tfd.MultivariateNormalDiag(loc, scale)
self.code = self.posterior.sample()
# Define the loss.
x = self.code
x = tf.layers.dense(x, self.dense_size, tf.nn.relu)
x = tf.layers.dense(x, self.dense_size, tf.nn.relu)
loc = tf.layers.dense(x, self.n_dim)
scale = tf.layers.dense(x, self.n_dim , tf.nn.softplus)
self.decoder = tfd.MultivariateNormalDiag(loc, scale)
self.likelihood = self.decoder.log_prob(self.x)
self.divergence = tf.contrib.distributions.kl_divergence(self.posterior, self.prior)
self.elbo = tf.reduce_mean(self.likelihood - self.divergence)
self._cost = -self.elbo
self.saver = tf.train.Saver()
self.sess = tf.Session()
def fit(self, Xs, learning_rate=0.001, num_epochs=10, batch_sz=200, verbose=True):
self.optimize = tf.train.AdamOptimizer(learning_rate).minimize(self._cost)
batches_per_epoch = int(np.ceil(len(Xs[0]) / batch_sz))
print("\n")
print("Training anomaly detector/dimensionalty reduction VAE for KPI",self.kpi)
print("\n")
print("There are",batches_per_epoch, "batches per epoch")
start = timer()
self.sess.run(tf.global_variables_initializer())
for epoch in range(num_epochs):
train_error = 0
self.sess.run(
self.ite.initializer,
feed_dict={
self.input: Xs,
self.batch_size: batch_sz})
for step in range(batches_per_epoch):
_, loss = self.sess.run([self.optimize, self._cost])
train_error += loss
if step == (batches_per_epoch - 1):
mean_loss = train_error / batches_per_epoch
if verbose:
print(
"Epoch {:^6} Loss {:0.5f}" .format(
epoch + 1, mean_loss))
if train_error == np.nan:
return False
end = timer()
print("\n")
print("Training time {:0.2f} minutes".format((end - start) / (60)))
return True
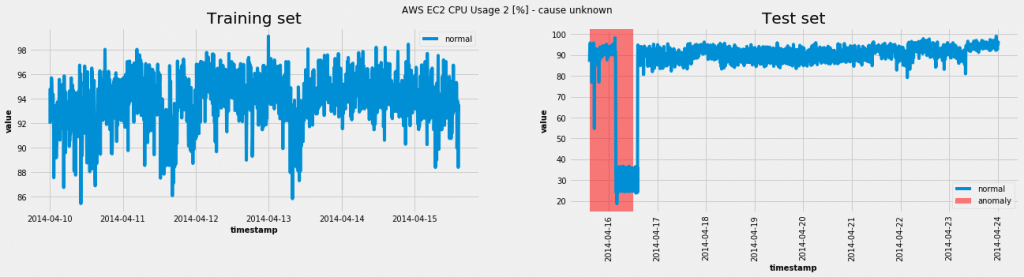
Korišćenje modela na jednom o setova podataka iz Numenta repera anomalija (NAB):
U ovom slučaju model je uspeo da postigne pravu pozitivnu stopu (TPR = 1,0) i lažnu pozitivnu stopu (FPR = 0,07). Za različte pragove verovatnoće anomalija dobijamo ROC krivu:
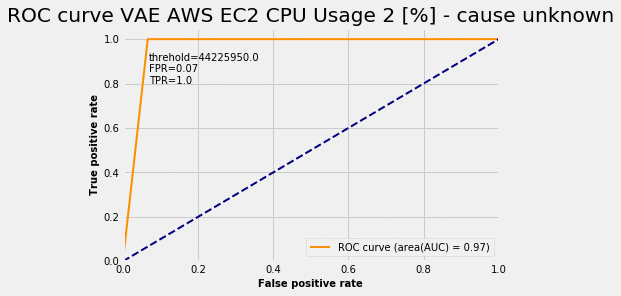
Odabirom očitanog praga sa ROC krive, dobijamo sledeće iz testnog skupa:
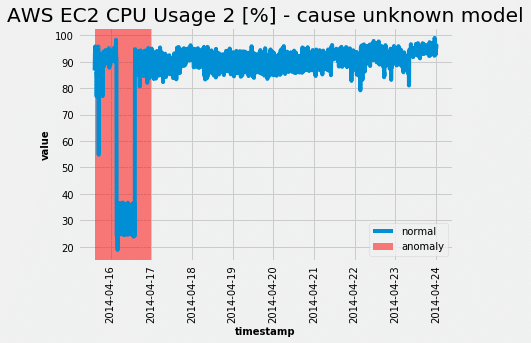
Baš kao što je ROC kriva sugerisala, model je bio u stanju da u potpunosti uhvati abnormalno ponašanje. Nažalost, pošto je svim modelima neuronskih mreža potrebno podešavanje hiperparametara, ova zver nije izuzetak. Međutim, jedini hiperparametar koji može u velikoj meri uticati na performanse je veličina kliznog prozora.
Nadam se da sam uspeo da predstavim ovaj prilično složen model jednostavnim rečima. Ohrabrujem vas da isprobate model na drugim skupovima podataka dostupnim ovde.
Nastavite sa učenjem i rešavanjem problema!
Praznična sezona je najvažniji period za trgovce Osim velikog obima prodaje, to je i prilika da ostavite trajan utisak na…
Read more
Praznična sezona je najvažniji period za trgovce Osim velikog obima prodaje, to je i prilika da ostavite trajan utisak na…
Read more
Detaljniji pogled na ono što AI analitika zaista znači Obučili ste svog AI agenta. Radi. Priča. Reaguje. Ali, da li…
Read more
Agentna veštačka inteligencija Zamislite da imate tim vrhunskih kuvara, ali vam je frižider pun pokvarjenih sastojaka. Bez obzira na to…
Read more